1、MPU6050介绍
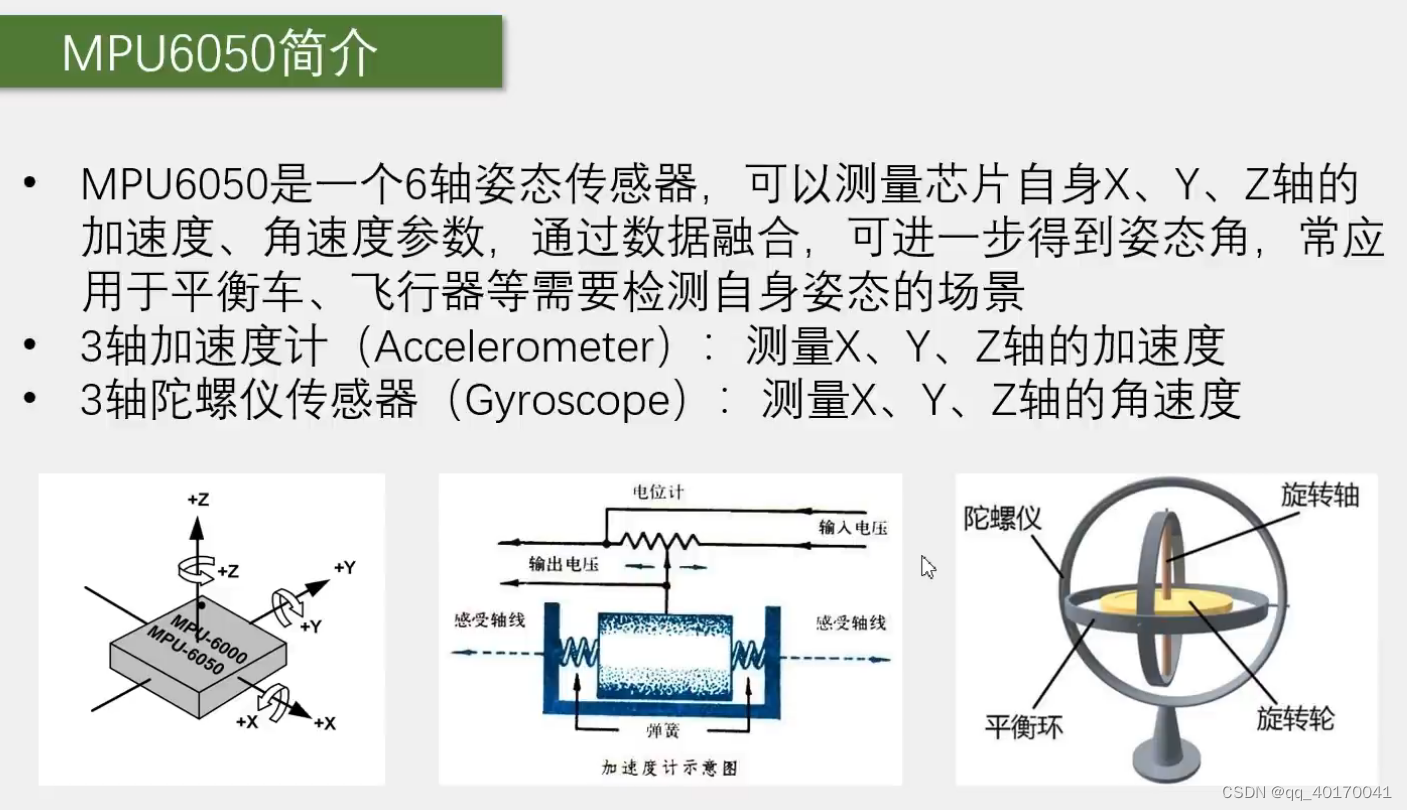
MPU6050是由三个陀螺仪和三个加速度传感器组成的6轴运动处理组件,是一款六轴(三轴加速度+三轴角速度(陀螺仪))传感器。
· 内部主要结构
陀螺仪、加速度计、数字运动处理器DMP(Digital Motion Processor)
MPU6050含有两个IIC接口,第一IIC接口可作为主接口给单片机传输数据;第二IIC接口用于连接一个第三方数字传感器(如外部磁力传感器等),然后通过这个IIC接口输出完整的9轴信号,否则只有6轴。
那么三轴、六轴、九轴传感器,这些传感器指的什么?
其中到底又有哪些区别呢?
实际上,只要说到多少轴的传感器一般是就是指加速度传感器(即加速计)、角速度传感器(即陀螺仪)、磁感应传感器(即电子罗盘)。这三类传感器测量的数据在空间坐标系中都可以被分解为X,Y,Z三个方向轴的力,因此也常常被称为3轴加速度计、3轴陀螺仪、3轴磁力计。
上面3类传感器有其各自的功能特点及应用,比如加速计可以测量设备的测斜情况,陀螺仪可以测量设备自身的旋转运动,还有磁力计可以定位设备的方位。通过它们相互组合和匹配融合又可以衍生出更多的不同应用,在叫法上通过这样简单的轴数上相加的可以变成六轴传感器或者九轴传感器。
六轴传感器:通常指的是三轴加速度计+三轴陀螺仪,三轴加速器是检测横向加速的,三轴陀螺仪是检测角度旋转和平衡的,可以用在体感游戏上。
九轴传感器:就是三轴加速度计+三轴陀螺仪+三轴磁强计的组合,在飞行器上是广泛应用的。 另外,在九轴传感器基础上在加入气压传感器,从而能获取海拔高度的数据,也有人把这些传感器组合称为十轴传感器。
正面
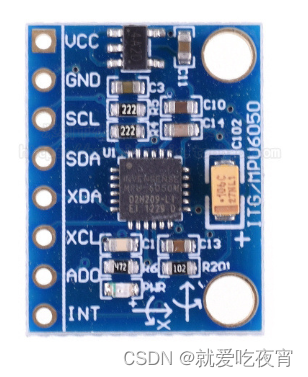
背面

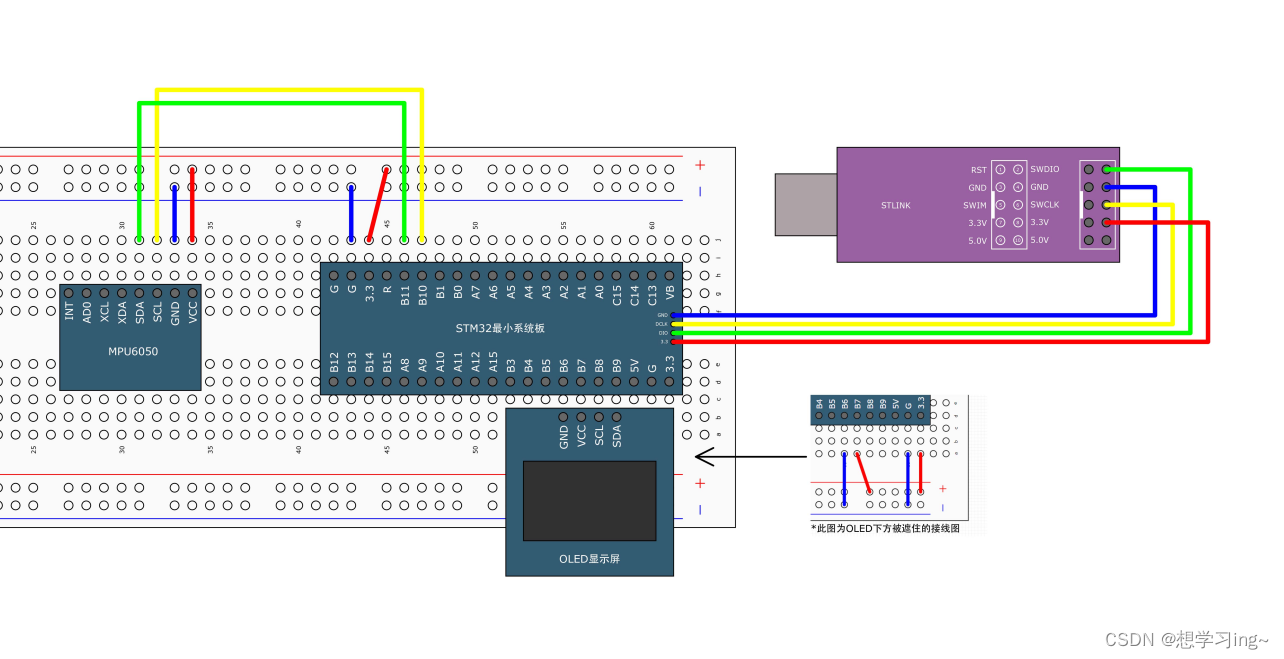
接口介绍:
SCL、SDA:是连接MCU的IIC接口,MCU通过这个IIC接口来控制MPU6050,此时MPU6050作为一个IIC从机设备,接单片机的I2C_SCL。
XCL、XDA:辅助IIC用来连接其他器件,可用来连接外部从设备,比如磁传感器,这样就可以组成一个九轴传感器,不需要连接单片机。
AD0:地址管脚,可以不接单片机。当MPU6050作为一个IIC从机设备的时候,有8位地址,高7位的地址是固定的,就是WHOAMI寄存器的默认——0x68,最低的一位是由AD0的连线决定的。
AD0接GND时,高8位的最后一位是0,所以iic从机地址是0x68;
AD0接VCC时,高8位的最后一位是1,所以iic从机地址是0x69。
INT:数据输出的中断引脚,可以不接单片机,准备好数据之后,通过中断告诉STM32,从而获取数据。
VCC:接3.3V或5V电源
GND:接地
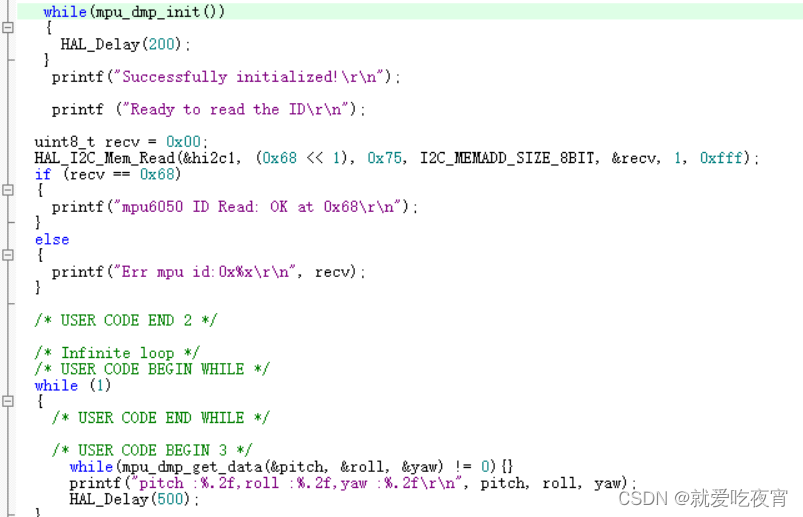
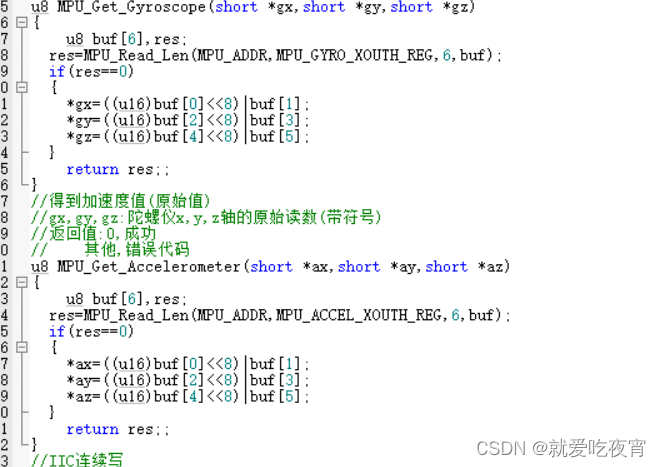
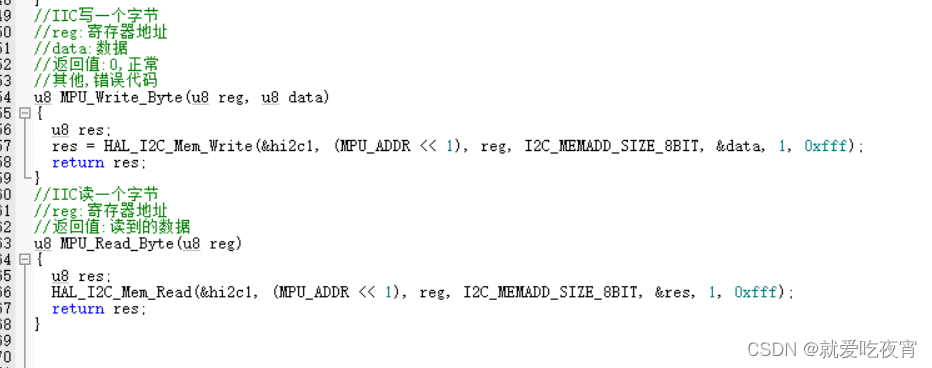
相关代码: