本次重点
STM32寄存器来控制led灯状态反转
按键控制与非阻塞
回顾
GPIO口的八种模式:
| 模式 | 描述 |
|---|---|
| 输入 | |
| 上拉输入 | 默认情况,输入高 |
| 下拉输入 | |
| 浮空输入 | |
| 模拟输入 | |
| 输出 | |
| 推挽输出 | 0 1 |
| 开漏输出 | 0 不能通过自身输出高电平信号1 |
| 复用推挽 | |
| 复用开漏 |
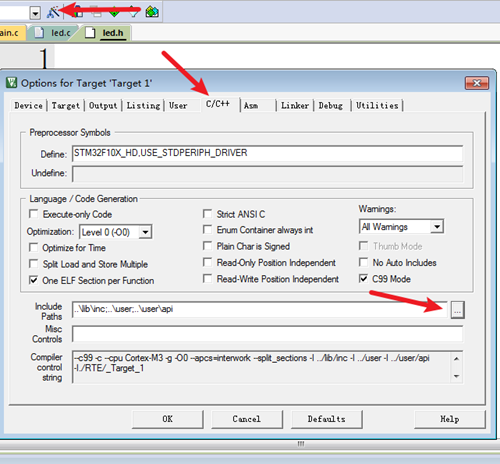
添加头文件路径
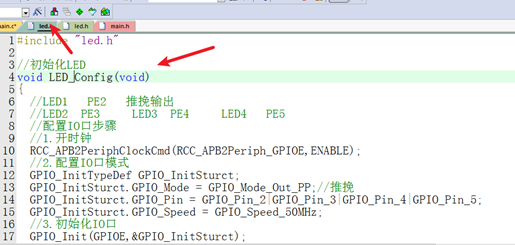
模块化编程:
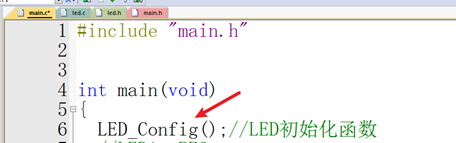
函数调用:


ok,我们开始学习今天的内容
延时函数
单片机中延时的方法:
1. 空函数延时计算
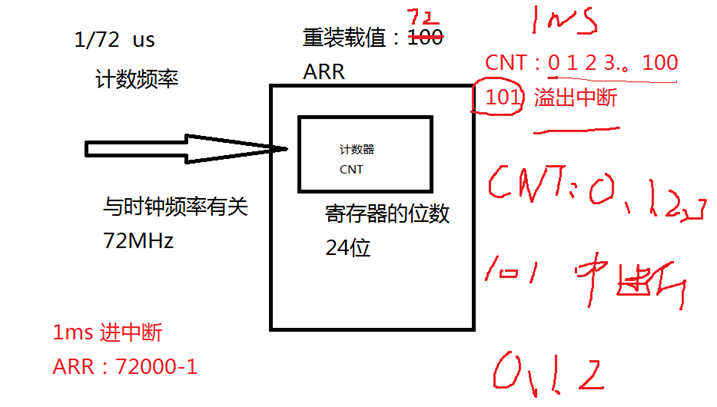
空函数的执行时间取决于处理器的时钟频率。假设处理器的时钟频率为72MHz(即每秒钟执行7200万次指令),我们可以通过空函数来实现延时。
首先,我们知道执行1个空函数所需的时间是多少:

然后,我们想要实现1微秒的延时,所以我们需要执行的空函数次数可以通过以下计算得到:

所以,你需要大约72个空函数来实现1微秒的延时。
那么我们为了方便把你的写法,就定义函数来实现延时
void Delay_lus(void)
{
__nop();__nop();__nop();__nop();__nop();__nop();__nop();__nop();__nop();__nop();
__nop();__nop();__nop();__nop();__nop();__nop();__nop();__nop();__nop();__nop();
__nop();__nop();__nop();__nop();__nop();__nop();__nop();__nop();__nop();__nop();
__nop();__nop();__nop();__nop();__nop();__nop();__nop();__nop();__nop();__nop();
__nop();__nop();__nop();__nop();__nop();__nop();__nop();__nop();__nop();__nop();
__nop();__nop();__nop();__nop();__nop();__nop();__nop();__nop();__nop();__nop();
__nop();__nop();__nop();__nop();__nop();__nop();__nop();__nop();__nop();__nop();
__nop();__nop();
}
这样子就可以轻松实现1微秒的延时
那么纳秒和毫秒函数的写法也就很简单了
//毫秒
void Delay_us(uint32_t time)
{
while(time--)
{
Delay_lus();
}
}
//微秒
void Delay_ms(uint32_t time)
{
while(time--)
{
Delay_us(1000);
}
}
2. 定时器延时
定时器延时是一种更精确和可控的延时方法。通过配置定时器,可以生成精确的时间间隔,而不受CPU负载和其他因素的影响。这使得定时器延时比简单的空函数延时更加可靠和准确。
我们后面会讲到,这里先不展开
按键控制
人机交互的接口
我们所使用的板子上一共有四个按钮,我们来看看电路图
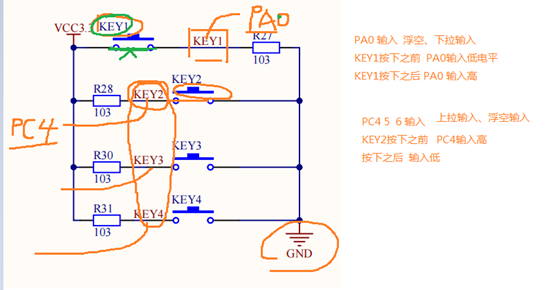
我们要使用按钮,第一步一定是初始化
void KET_Config()
{
//KEY1 --paPA0
//KEY2 --paPC5
//KEY3 --paPC6
//浮空输入
//step1.开时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOE|RCC_APB2Periph_GPIOA,ENABLE);
//step2.配置IO口模式
GPIO_InitTypeDef GPIO_InitSTRUCT;
GPIO_InitSTRUCT.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_InitSTRUCT.GPIO_Pin = GPIO_Pin_0;
GPIO_InitSTRUCT.GPIO_Speed = GPIO_Speed_50MHz;
//step3.初始化IO口
GPIO_Init(GPIOA,&GPIO_InitSTRUCT);
GPIO_InitSTRUCT.GPIO_Pin = GPIO_Pin_4|GPIO_Pin_5|GPIO_Pin_6;
GPIO_Init(GPIOC,&GPIO_InitSTRUCT);
}
那接下来,我们自然要判断按钮是否被按下
我们只需要判断电平是否为高
不要忘了消抖哦
//按键检测
uint8_t KEY_Check(void)
{
//按键检测
if(GPIO_ReadInputDataBit(GPIOA,GPIO_Pin_0))
{
Delay_ms(15);
if(GPIO_ReadInputDataBit(GPIOA,GPIO_Pin_0))
{
while(GPIO_ReadInputDataBit(GPIOA,GPIO_Pin_0))
{}
return 1;
}
}
return 0;
}
好的,这个时候我们就可以去通过按钮去控制led灯的亮灭了
那么就又引出了一个新的问题
我们该如何才能用同一个按钮来控制led灯的状态反转呢?
STM32寄存器来控制led灯状态反转
实际上我们要实现的操作很简单
我们只需要去改变小灯泡引脚的状态
如果是0就变成1,如果是1就变成0
那么该如何改变呢
很简单,实际上只有一行代码
GPIOE->ODR ^=0x1<<2;
我们一起来看一下这行代码
GPIOE: 这表示你正在操作的是GPIOE端口。ODR: 这是GPIOE端口的输出数据寄存器。^=: 这是按位异或赋值操作符,用于对变量进行按位异或运算后再赋值给自身。0x1 << 2: 这是将十六进制数1向左移动2位,相当于将二进制数0001左移两位,得到0100,即十六进制数0x4。
可能有些抽象了,那我们这么来理解
首先
我们led所在的gpio状态是怎么储存的
就是使用寄存器保存,而这个寄存器名字就叫做ODR
名字可以在对应的技术参考手册里面查到
里面是怎么存储的呢(这里GPIOE有十六个引脚,所以我们用十六位寄存器来演示)
0000000000000000
这就代表着我们的引脚全部都是低电平
那么实际情况可能是这样子的
0010111000110110
然后
我们的led灯在2号引脚,也就是倒数第3位(寄存器从0开始)
也许有人问为什么是倒数的位呢,其实也很简单,你写一个1当然是从最右边开始写起,进位再向前
那我们该如果只改变第三位的状态,让它反转,而且还能让别的位保持不变呢
我们学过的知识
单目操作符 ^
移位操作符 <<
我们就要用到单目操作符 按位异或 相异为真
那这里就涉及到一个小技巧,二进制数和1或都是取反,和0或都是它本身
移位操作符我们也很熟悉了,如果大家又不是很清楚的可以去看我的前几篇博客
最后
那么我们直接看例子
GPIOE->ODR ^=0x1<<2;
我们假设寄存器目前里面状态是这样子的
0010111000110110
我们需要让第三位反转电平
那么我们只需要让它和这样一串数字相或就行
0000000000000100
那我们怎么得到上面那串数字呢
我们只需要定义一串
0000000000000001
然后这串数字左移两位就ok啦
再用或来计算即可得到
0010111000110010
大家可以写一下试一下
明天将会更新
阻塞与非阻塞 串口通信
相关内容



















![[Qt] QString::fromLocal8Bit 的使用误区](https://img-blog.csdnimg.cn/direct/34e768b2de6140c59a3621cc4c8dec8b.png)








![[flink] flink macm1pro 快速使用从零到一](https://img-blog.csdnimg.cn/img_convert/a3c6f024422d874a46ac8e84c088cc5e.png)


