目录
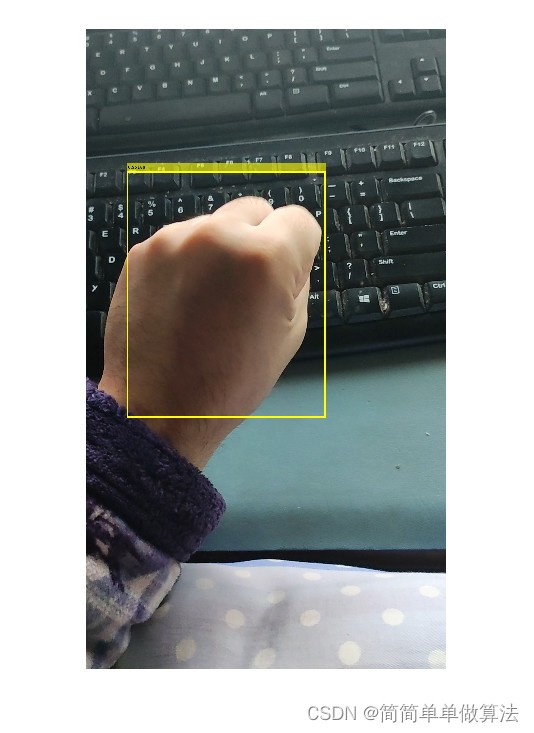
1.算法运行效果图预览
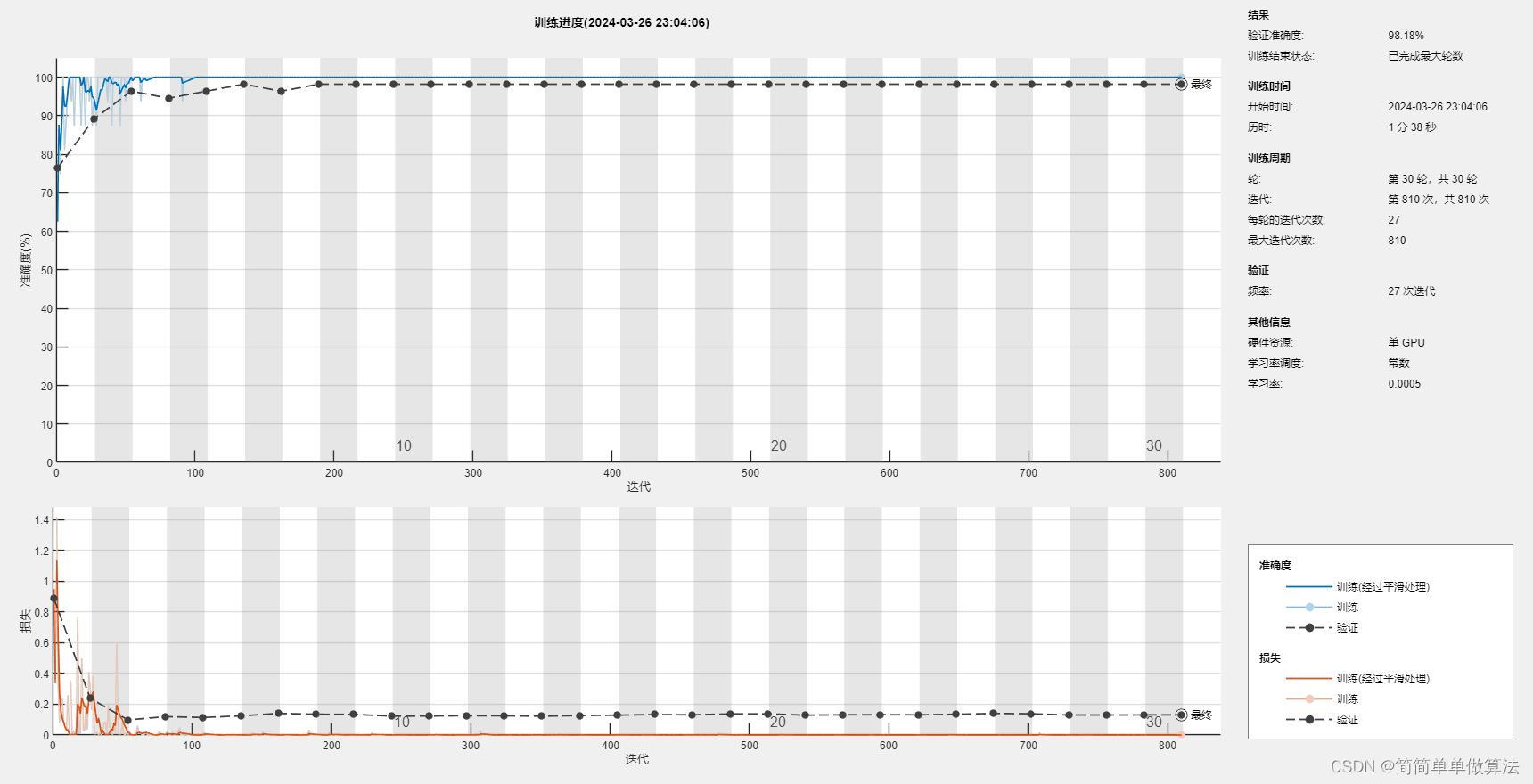
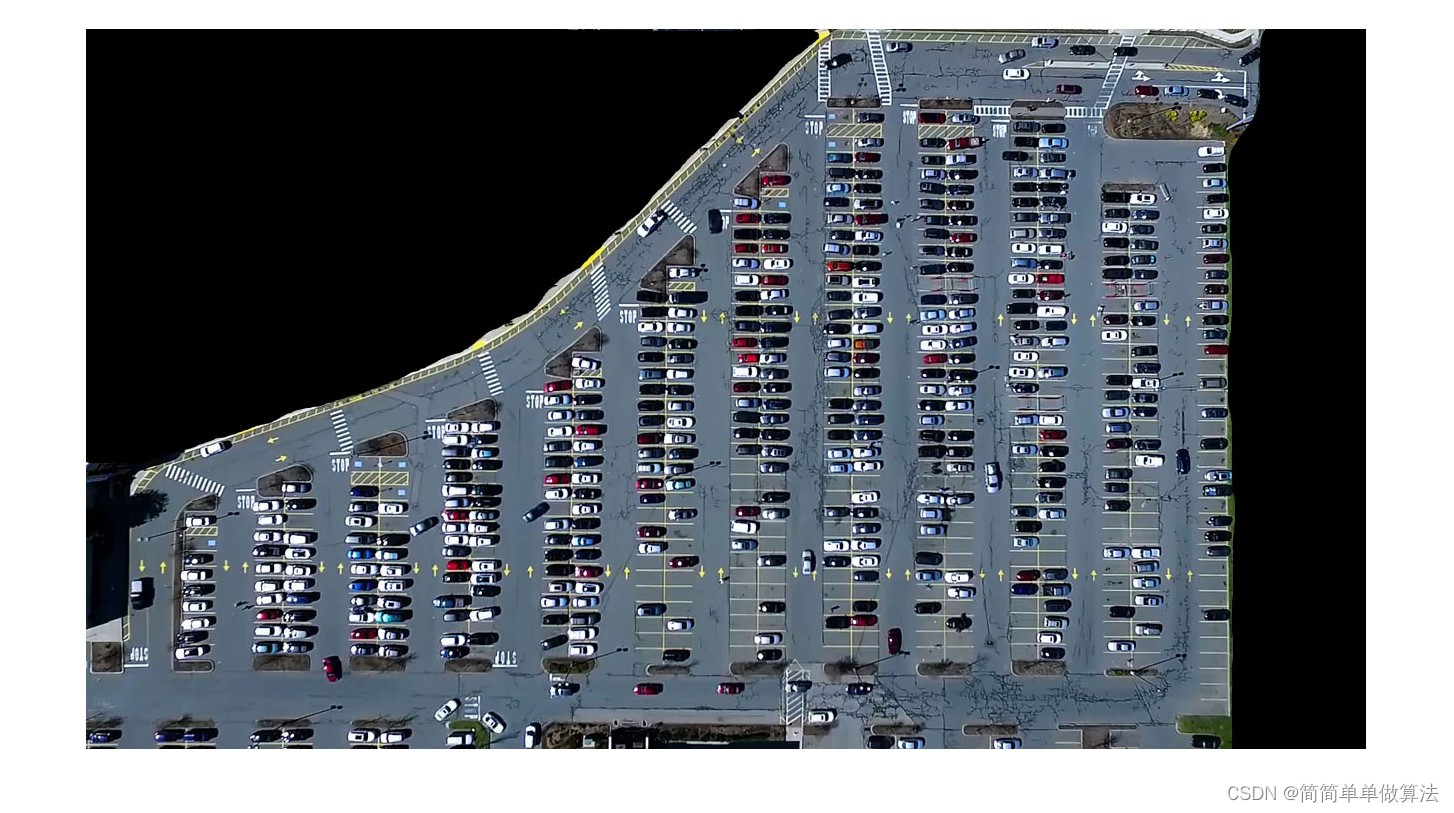
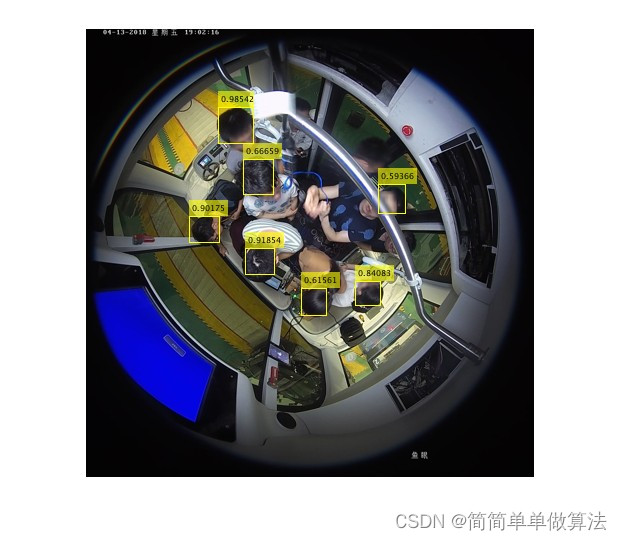
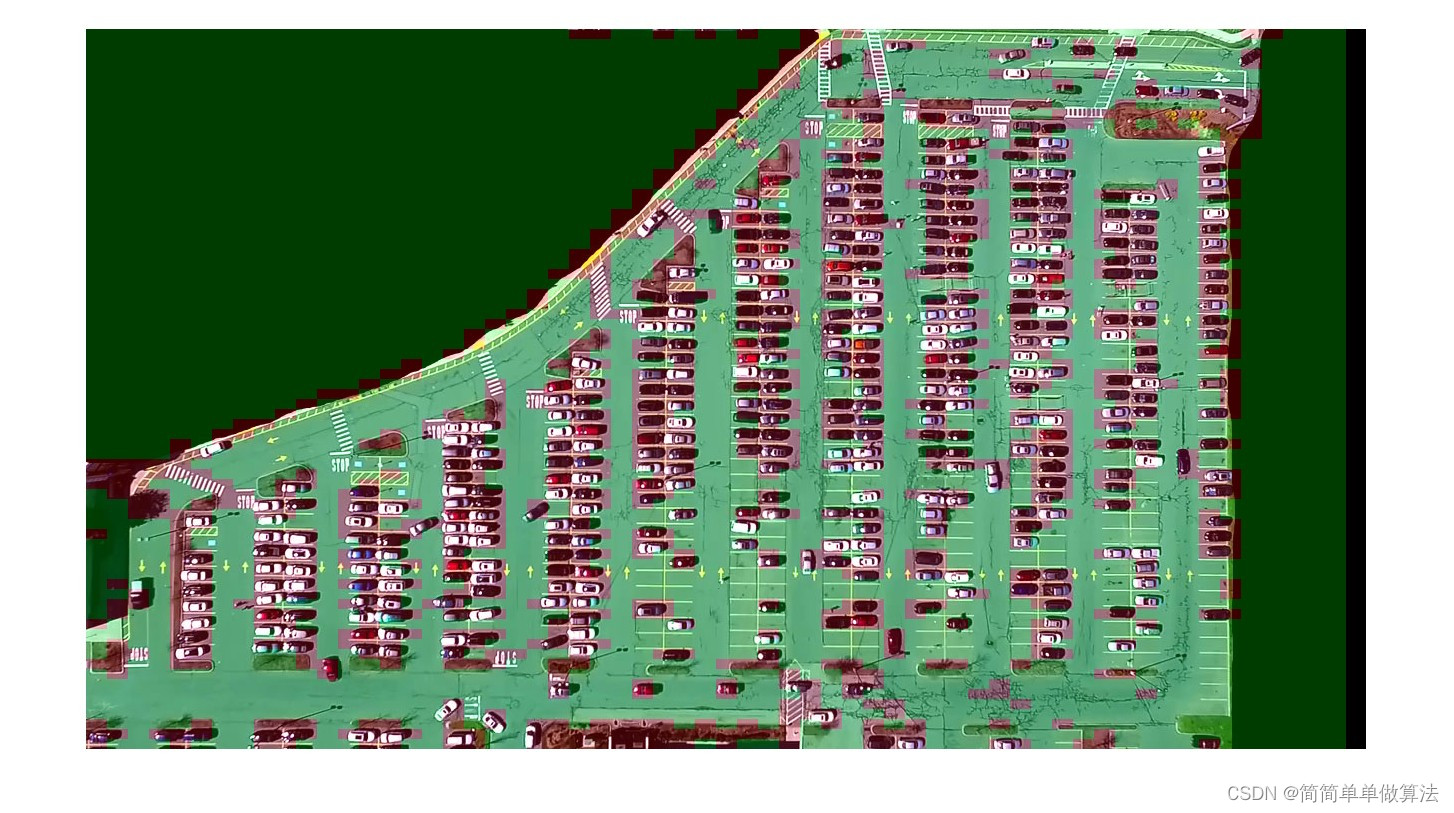
上图测试结果如下图所示:
2.算法运行软件版本
matlab2022a
3.部分核心程序
image = imread('image_test\test.jpg');
image2= image;
%图片划分大小
R = 10;
C = 21;
[W,H,k] = size(image);
MASK = zeros(W,H);
for i = 1:floor(W/R)
[i,floor(W/R)]
for j = 1:floor(H/C)
tmps = imresize(image(R*(i-1)+1:R*i,C*(j-1)+1:C*j,:),[224,224]);
[Predicted_Label, Probability] = classify(net, tmps);
if double(Predicted_Label)==2
image2(R*(i-1)+1:R*i,C*(j-1)+1:C*j,1)=image(R*(i-1)+1:R*i,C*(j-1)+1:C*j,1)+60;
image2(R*(i-1)+1:R*i,C*(j-1)+1:C*j,2)=image(R*(i-1)+1:R*i,C*(j-1)+1:C*j,2);
image2(R*(i-1)+1:R*i,C*(j-1)+1:C*j,3)=image(R*(i-1)+1:R*i,C*(j-1)+1:C*j,3);
else
image2(R*(i-1)+1:R*i,C*(j-1)+1:C*j,1)=image(R*(i-1)+1:R*i,C*(j-1)+1:C*j,1);
image2(R*(i-1)+1:R*i,C*(j-1)+1:C*j,2)=image(R*(i-1)+1:R*i,C*(j-1)+1:C*j,2)+60;
image2(R*(i-1)+1:R*i,C*(j-1)+1:C*j,3)=image(R*(i-1)+1:R*i,C*(j-1)+1:C*j,3);
end
end
end
figure;
imshow(image);
figure;
imshow(image2);
1224.算法理论概述
随着城市交通管理和智慧停车系统的快速发展,停车场车辆检测已成为实现高效车位管理、智能计费的关键技术之一。深度学习,尤其是基于卷积神经网络(CNN)的目标检测技术,以其卓越的特征提取和模式识别能力,为停车场车辆检测提供了强大工具。
GoogLeNet是一种创新的深度卷积神经网络,其核心是Inception模块。Inception模块通过多尺度并行卷积路径提取多维度特征,有效地提升了网络的表达能力和计算效率。GoogLeNet网络由一系列Inception模块堆叠而成,辅以辅助分类器和全局平均池化层,最终用于分类任务。针对停车场车辆检测任务,我们将其改造为基于滑动窗口的两阶段检测框架,即首先利用GoogLeNet提取图像特征,然后通过后处理步骤(如滑窗检测、非极大值抑制等)生成车辆检测结果。
在停车场车辆检测任务中,GoogLeNet模型作为特征提取器,其损失函数主要体现在分类器部分。我们采用二分类交叉熵损失(Binary Cross-Entropy Loss, BCE Loss)衡量分类器预测车辆存在与否的准确性:

模型训练时,首先在大规模通用图像数据集上预训练GoogLeNet,然后在停车场车辆检测数据集上进行微调,优化网络权重以适应车辆检测任务。
针对停车场车辆检测任务,需对GoogLeNet进行以下适应性调整:
数据集准备:收集大量包含停车场场景的图像,标注其内车辆的精确边界框。数据增强策略如翻转、旋转、缩放、光照变换等有助于提高模型泛化能力。
滑窗参数设定:依据停车场车辆的实际尺寸分布,合理设置滑动窗口的尺度和比例,确保覆盖各类车辆。
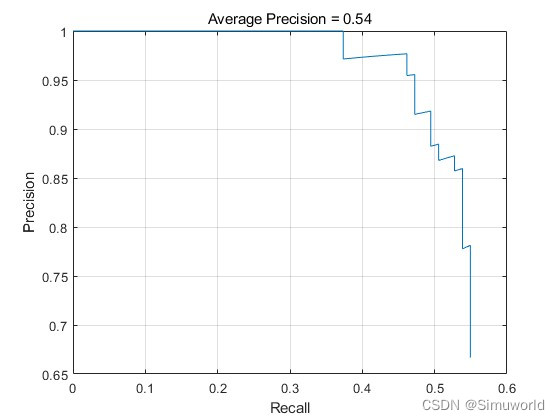
性能评估:使用平均精度(Average Precision, AP)等指标评价模型在停车场车辆检测上的性能。AP综合考虑了召回率和精确率,能全面反映模型在不同IoU阈值下的表现。
5.算法完整程序工程
OOOOO
OOO
O