本文目录
在 Linux ARM 平台上使用 I2C 时,不需要手动编写 I2C 时序是因为 Linux 内核和硬件抽象层已经处理了这些复杂的细节,提供了高层次的接口供开发者使用。
无论是哪个IIC从机设备,我们只需要实现 IIC读数据和IIC写数据即可。然后根据不同设备的手册规则来向寄存器写或者读数据,从而实现某些特定的功能。
一、基础
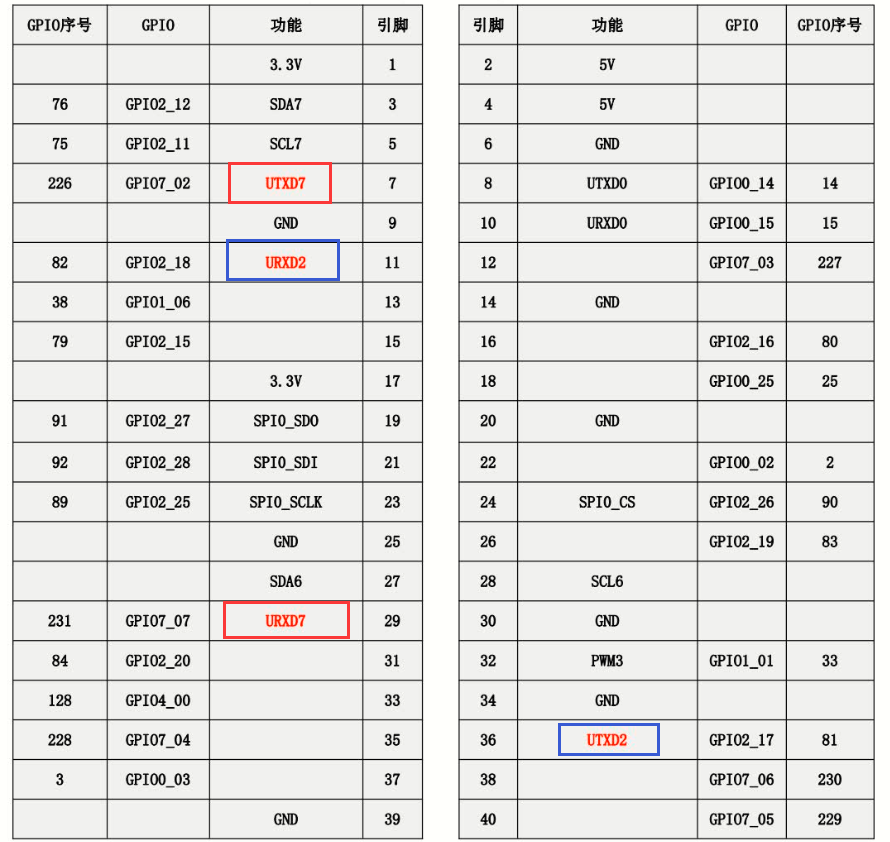
1. 查看开发板手册,获取可用IIC总线
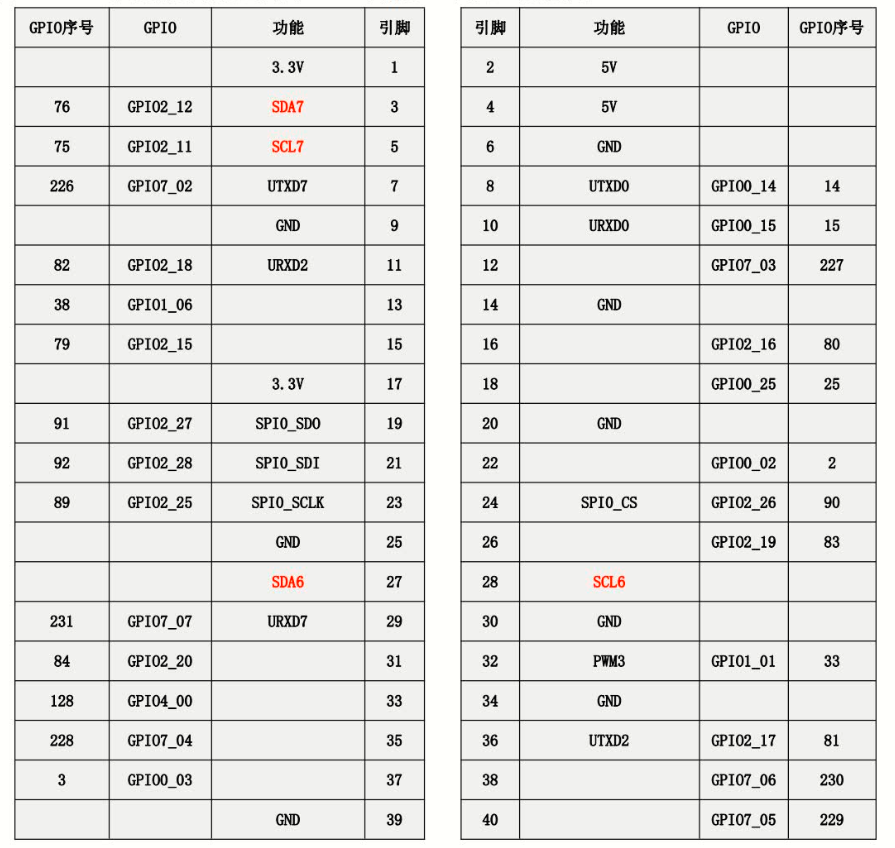
香橙派OrangepiAipor引脚只有两个IIC可以使用,分别是IIC6和IIC7。分别对应如下两个设备节点。

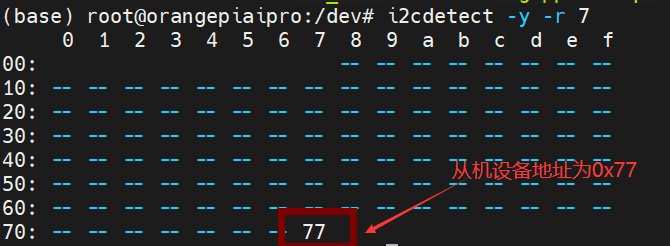
2. 挂载从机,查看从机地址。
我们将从机设备随便连接到IIC的其中一个上面,这里我们使用BMP180作为从机连接香橙派的IIC7总线,对应的设备节点为i2c-7。我们可以使用命令来查看IIC总线7上挂载的设备的地址。命令:i2cdetect -y -r 7。这样我们就获得了从机的地址(当然可以查看BMP180手册获得)。
3. 查看从机手册,使用命令读/写某寄存器值。
BMP180手册中寄存器地址分布如下: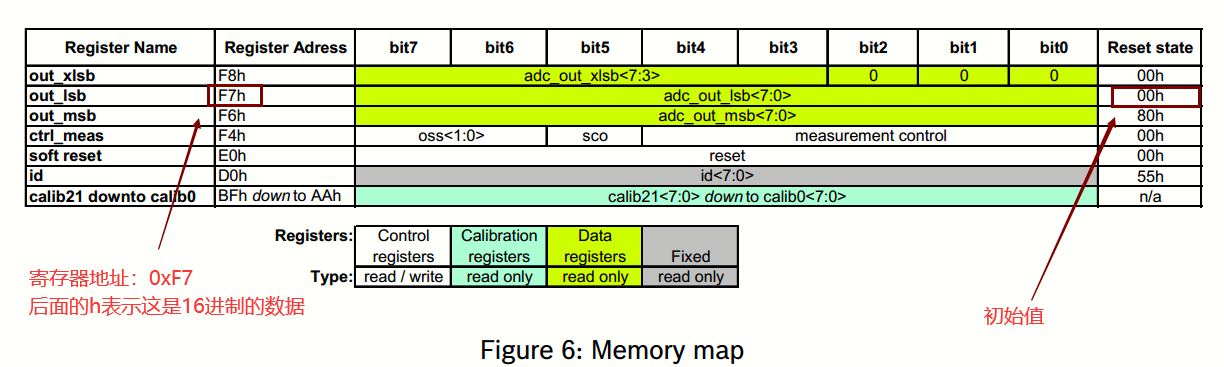
●读取 i2c7 总线上,从机设备地址为0x77 ,寄存器地址为 0xF7上的值。
i2cget -y 7 0x77 0xF7


●写入i2c7 总线上,从机设备地址为0x77 ,寄存器地址为 0xF4,值为0X2E。
i2cset 7 0x77 0xF4 0x2E
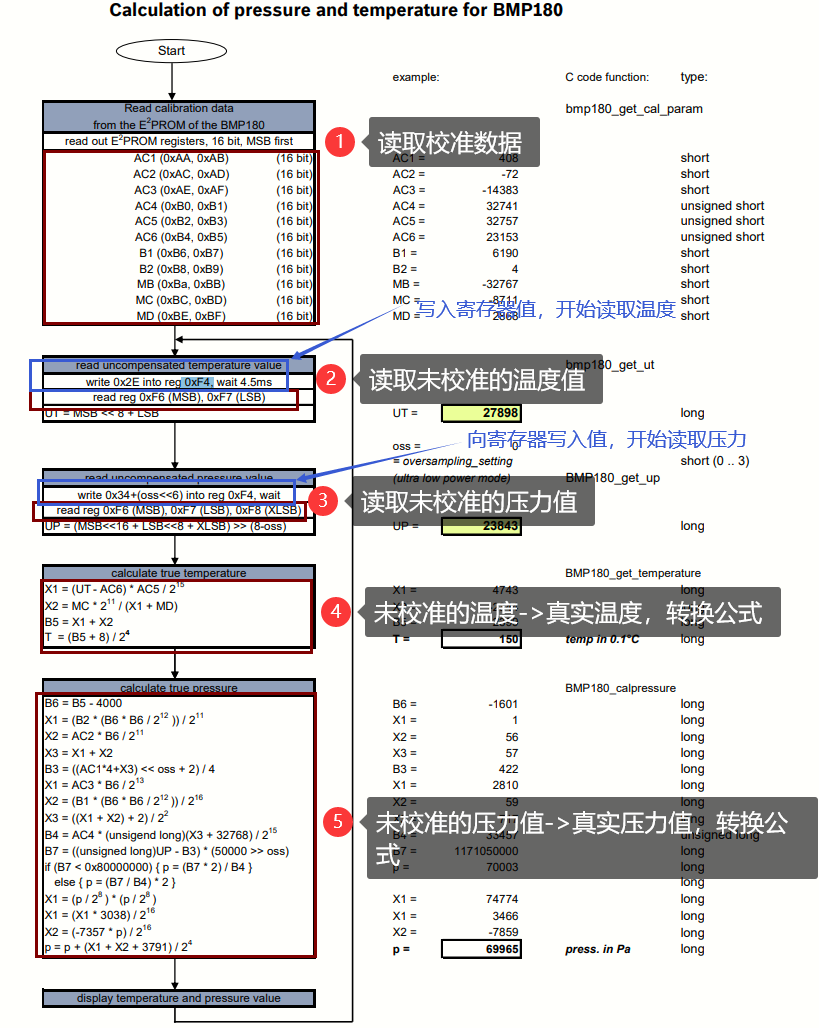
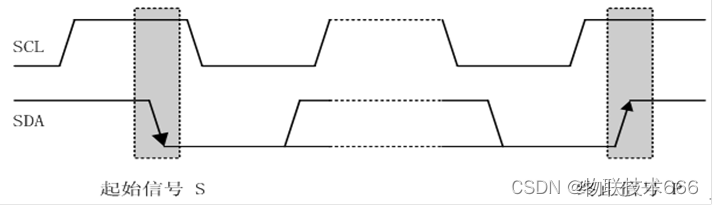
4. 查看从机手册通信流程。
我们可以发现,通信大致流程就是往寄存器里写值,然后读取寄存器的值。将获取的值通过公式转换为真实的温度/压力值。
二、IIC常用API
1. iic数据包/报
头文件:#include <linux/i2c.h>
●数据包:
在 Linux 内核中,struct i2c_msg 结构体用于描述 I2C 消息,这是在 I2C 总线上传输的数据块。它被用作 ioctl 调用的一部分,通过 I2C_RDWR 命令进行 I2C 读写操作。
struct i2c_msg {
__u16 addr; /* 从设备地址 */
__u16 flags; /* 消息标志,写:0, 读:1 */
__u16 len; /* 数据缓冲区长度 */
__u8 *buf; /* 数据缓冲区。对于写操作,这里存储的是要发送的数据;对于读操作,这里存储的是接收到的数据。 */
};
●数据报:包含多个数据包。
struct i2c_rdwr_ioctl_data {
struct i2c_msg *msgs; /* 指向 I2C 消息数组的指针 */
__u32 nmsgs; /* 消息的数量 */
};
2. ioctl函数
是一个系统调用,专门用来让程序与设备进行通信。它有点像是一个“万能”函数,通过它可以向设备发送各种控制命令或者配置设备的某些参数。
int ioctl(int fd, unsigned long request, ...);
//int fd :设备的文件描述符。
//unsigned long request:请求,例如可读可写等。
//...(可变参数):根据 request 的不同,ioctl 可能需要一个或多个额外的参数。这些参数的类型和数量取决于具体的控制命令。
三、代码编写流程
1. IIC读取数据
传入打开的IIIC设备文件描述符、要读取的从机设备地址、 要读取的寄存器地址、将数据读取到哪、读多少。
在 I2C 通信中,通常在读取数据之前需要先向设备写入要读取的寄存器地址。这是因为在 I2C 设备中,数据的读取通常是通过向设备发送特定的寄存器地址来触发的。因此,为了从正确的寄存器地址读取数据,需要先将要读取的寄存器地址发送给设备。
/*
uint8_t slave_addr :从机地址
uint8_t reg_addr :要读取的寄存器
uint8_t* buffer:读取的数据存在哪
int length:读取的长度
*/
int iic_read(int fd, uint8_t slave_addr, uint8_t reg_addr, uint8_t* buffer, int length)
{
struct i2c_msg msgs[2]; //读数据包以及写数据包
struct i2c_rdwr_ioctl_data pack; //数据报
uint8_t addr[1]; //存储寄存器地址
int ret;
addr[0] = reg_addr; //要读取的寄存器地址。
msgs[0].addr = slave_addr;
msgs[0].flags = 0; // 写方向
msgs[0].buf = addr; //向目标设备发送要读取的寄存器地址。
msgs[0].len = sizeof(addr);
msgs[1].addr = slave_addr;
msgs[1].flags = 1; // 读方向
msgs[1].buf = buffer; //从寄存器读取的内容存到buffer中。
msgs[1].len = length; //读取的长度
pack.msgs = msgs;
pack.nmsgs = 2;
ret = ioctl(fd, I2C_RDWR, &pack);
if (ret < 0) {
perror("ioctl I2C_RDWR failed");
return -1;
}
return 0;
}
2. IIC写入数据
传入打开的IIIC设备文件描述符、要写入的从机设备地址、 要写入的寄存器地址、写什么数据、写多少。
int iic_write(int fd, uint8_t slave_addr, uint8_t reg_addr, uint8_t* data, int length)
{
struct i2c_msg msg;
struct i2c_rdwr_ioctl_data pack;
uint8_t buffer[length + 1]; //为了包含寄存器地址,需要额外的空间
int ret;
buffer[0] = reg_addr; // 将寄存器地址作为第一个字节
// 将要写入的数据拷贝到缓冲区中
memcpy(buffer + 1, data, length);
msg.addr = slave_addr;
msg.flags = 0; // 写方向
msg.len = length + 1; // 包含了寄存器地址
msg.buf = buffer;
pack.msgs = &msg;
pack.nmsgs = 1;
ret = ioctl(fd, I2C_RDWR, &pack);
if (ret < 0) {
perror("ioctl I2C_RDWR failed");
return -1;
}
return 0;
}
3. 读取校验参数
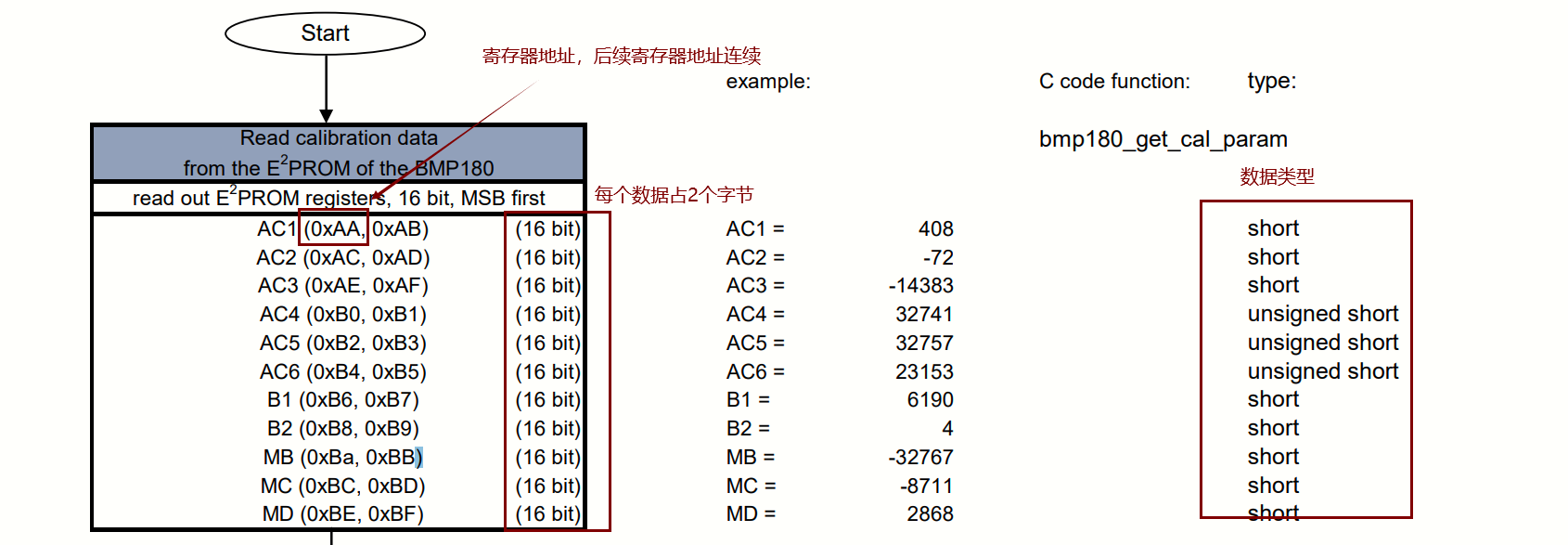
由于在Linux-arm下是大端序,则先读取高位,再读低位。
#define Slave_Addr 0x77
void read_calibration_data(int fd, int16_t* AC1, int16_t* AC2, int16_t* AC3,
uint16_t* AC4, uint16_t* AC5, uint16_t* AC6, int16_t* B1,
int16_t* B2, int16_t* MB, int16_t* MC, int16_t* MD)
{
uint8_t buffer[22]; //每个数据占2个字节,共有11个数据。
iic_read(fd, Slave_Addr , 0xAA, buffer, 22);
*AC1 = (buffer[0] << 8) | buffer[1];
*AC2 = (buffer[2] << 8) | buffer[3];
*AC3 = (buffer[4] << 8) | buffer[5];
*AC4 = (buffer[6] << 8) | buffer[7];
*AC5 = (buffer[8] << 8) | buffer[9];
*AC6 = (buffer[10] << 8) | buffer[11];
*B1 = (buffer[12] << 8) | buffer[13];
*B2 = (buffer[14] << 8) | buffer[15];
*MB = (buffer[16] << 8) | buffer[17];
*MC = (buffer[18] << 8) | buffer[19];
*MD = (buffer[20] << 8) | buffer[21];
}
//下面内容只是为了演示如何使用而已。
int main()
{
int16_t AC1, AC2, AC3, B1, B2, MB, MC, MD;
uint16_t AC4, AC5, AC6;
// 读取校准数据
read_calibration_data(fd, &AC1, &AC2, &AC3, &AC4, &AC5, &AC6, &B1, &B2, &MB, &MC, &MD);
}
4. 读取未校准的温度值
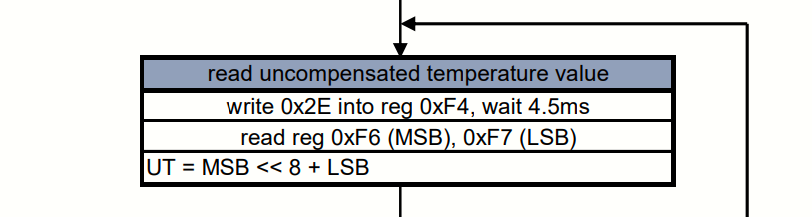
由于在Linux-arm下是大端序,则先读取高位,再读低位。
#define Slave_Addr 0x77
#define Data_Out_MSB 0xF6
#define Data_Out_LSB 0xF7
#define Tempture_Pressure_reg 0xF4
// 启动温度测量
int main()
{
uint8_t send_data[1];
uint8_t receive_data[2];
int32_t raw_temp; //未校准的温度数据。
send_data[0] = 0x2e; //要写入的数据
if (iic_write(fd, Slave_Addr, Tempture_Pressure_reg , send_data,1) <0) { //开始测量温度
perror("iic_write error");
close(fd);
return -1;
}
usleep(4500); // 等待测量完成
// 读取未校准的温度数据
if (iic_read(fd, Slave_Addr, Data_Out_MSB , receive_data, 2) < 0) {
perror("iic_read error");
close(fd);
return -1;
}
raw_temp= receive_data[0]<<8|receive_data[1]; //未校准的温度值
}
5. 读取未校准的压力值
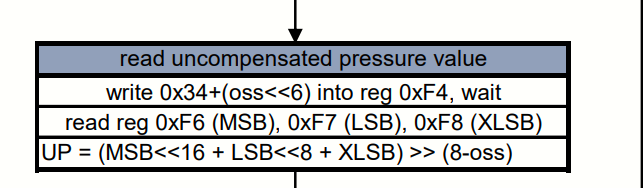
由于在Linux-arm下是大端序,则先读取高位,再读低位。
#define Slave_Addr 0x77
#define Data_Out_MSB 0xF6
#define Data_Out_LSB 0xF7
#define Data_Out_XLSB 0xF8
#define Tempture_Pressure_reg 0xF4
// 启动温度测量
/*
通常,"oss" 的取值范围在 0 到 3 之间,代表不同的过采样率。具体取值对应的过采样率取决于传感器型号和制造商的实现。在 BMP180 中,oss 的取值对应着以下过采样率:
oss = 0: 单次采样
oss = 1: 2 倍过采样
oss = 2: 4 倍过采样
oss = 3: 8 倍过采样
本文采用单次采样即可。
*/
int main()
{
uint8_t send_data[1];
uint8_t receive_data[3];
int32_t raw_pressure; //未校准的压力数据。
send_data[0] = 0x34; //要写入的数据
if (iic_write(fd, Slave_Addr, Tempture_Pressure_reg , send_data,1) <0) { //开始测量压力
perror("iic_write error");
close(fd);
return -1;
}
usleep(4500); // 等待测量完成
// 读取未校准的压力数据
if (iic_read(fd, Slave_Addr, Data_Out_MSB , receive_data, 3) < 0) {
perror("iic_read error");
close(fd);
return -1;
}
raw_pressure =(receive_data[0]<<16|receive_data[1]<<8|receive_data[0]) >>8; //未校准的压力值
}
6. 将未校准的测量值转为真实值
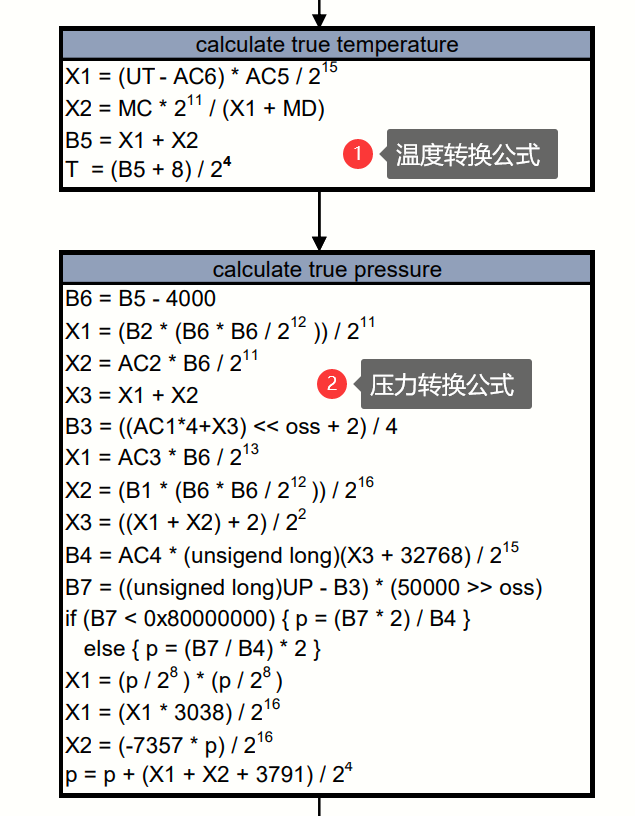
注意:代码中的右移多少位就相当于乘了2的几次方。左移相当于除。
//这里的参数很多都是校准参数。
void calculate_true_values(int32_t raw_temp, int32_t raw_pressure, int32_t* true_temp, int32_t* true_pressure, int16_t AC1, int16_t AC2, int16_t AC3, uint16_t AC4, uint16_t AC5, uint16_t AC6, int16_t B1, int16_t B2, int16_t MB, int16_t MC, int16_t MD) {
int32_t X1, X2, X3, B3, B5, B6, B7, p;
uint32_t B4;
// 温度计算,
X1 = (raw_temp - AC6) * AC5 >> 15;
X2 = (MC << 11) / (X1 + MD);
B5 = X1 + X2;
*true_temp = (B5 + 8) >> 4;
// 压力计算
B6 = B5 - 4000;
X1 = (B2 * (B6 * B6 >> 12)) >> 11;
X2 = AC2 * B6 >> 11;
X3 = X1 + X2;
B3 = (((AC1 * 4 + X3) << 1) + 2) >> 2;
X1 = AC3 * B6 >> 13;
X2 = (B1 * (B6 * B6 >> 12)) >> 16;
X3 = ((X1 + X2) + 2) >> 2;
B4 = AC4 * (uint32_t)(X3 + 32768) >> 15;
B7 = ((uint32_t)raw_pressure - B3) * (50000 >> 1);
if (B7 < 0x80000000) {
p = (B7 * 2) / B4;
} else {
p = (B7 / B4) * 2;
}
X1 = (p >> 8) * (p >> 8);
X1 = (X1 * 3038) >> 16;
X2 = (-7357 * p) >> 16;
*true_pressure = p + ((X1 + X2 + 3791) >> 4);
}
四、完整代码
iic.c
#include <stdint.h>
#include <string.h>
#include "iic.h"
int iic_init(const char *device)
{
return open(device,O_RDWR); //可读可写
}
int iic_close(int fd)
{
return close(fd);
}
/*
uint8_t slave_addr :从机地址
uint8_t reg_addr :要读取的寄存器
uint8_t* buffer:读取的数据存在哪
int length:读取的长度
*/
int iic_read(int fd, uint8_t slave_addr, uint8_t reg_addr, uint8_t* buffer, int length)
{
struct i2c_rdwr_ioctl_data pack;
struct i2c_msg msgs[2];
uint8_t addr[1];
int ret;
addr[0] = reg_addr; //要读取的寄存器地址。
msgs[0].addr = slave_addr;
msgs[0].flags = 0; // 写方向
msgs[0].len = sizeof(addr);
msgs[0].buf = addr; //向目标设备发送要读取的寄存器地址。
msgs[1].addr = slave_addr;
msgs[1].flags = 1; // 读方向
msgs[1].len = length;
msgs[1].buf = buffer;
pack.msgs = msgs;
pack.nmsgs = 2;
ret = ioctl(fd, I2C_RDWR, &pack);
if (ret < 0) {
perror("ioctl I2C_RDWR failed");
return -1;
}
return 0;
}
//IIC写数据
int iic_write(int fd, uint8_t slave_addr, uint8_t reg_addr, uint8_t* data, int length)
{
struct i2c_rdwr_ioctl_data pack;
struct i2c_msg msg;
uint8_t buffer[length + 1]; // 为了包含寄存器地址,需要额外的空间
int ret;
buffer[0] = reg_addr; // 将寄存器地址作为第一个字节
// 将要写入的数据拷贝到缓冲区中
memcpy(buffer + 1, data, length);
msg.addr = slave_addr;
msg.flags = 0; // 写方向
msg.len = length + 1; // 包含了寄存器地址
msg.buf = buffer;
pack.msgs = &msg;
pack.nmsgs = 1;
ret = ioctl(fd, I2C_RDWR, &pack);
if (ret < 0) {
perror("ioctl I2C_RDWR failed");
return -1;
}
return 0;
}
//读取校准参数
void read_calibration_data(int fd, int16_t* AC1, int16_t* AC2, int16_t* AC3, uint16_t* AC4, uint16_t* AC5, uint16_t* AC6, int16_t* B1, int16_t* B2, int16_t* MB, int16_t* MC, int16_t* MD) {
uint8_t buffer[22];
iic_read(fd, Slave_Addr, 0xAA, buffer, 22);
*AC1 = (buffer[0] << 8) | buffer[1];
*AC2 = (buffer[2] << 8) | buffer[3];
*AC3 = (buffer[4] << 8) | buffer[5];
*AC4 = (buffer[6] << 8) | buffer[7];
*AC5 = (buffer[8] << 8) | buffer[9];
*AC6 = (buffer[10] << 8) | buffer[11];
*B1 = (buffer[12] << 8) | buffer[13];
*B2 = (buffer[14] << 8) | buffer[15];
*MB = (buffer[16] << 8) | buffer[17];
*MC = (buffer[18] << 8) | buffer[19];
*MD = (buffer[20] << 8) | buffer[21];
}
//计算真实值
void calculate_true_values(int32_t raw_temp, int32_t raw_pressure, int32_t* true_temp, int32_t* true_pressure, int16_t AC1, int16_t AC2, int16_t AC3, uint16_t AC4, uint16_t AC5, uint16_t AC6, int16_t B1, int16_t B2, int16_t MB, int16_t MC, int16_t MD) {
int32_t X1, X2, X3, B3, B5, B6, B7, p;
uint32_t B4;
// 温度计算
X1 = (raw_temp - AC6) * AC5 >> 15;
X2 = (MC << 11) / (X1 + MD);
B5 = X1 + X2;
*true_temp = (B5 + 8) >> 4;
// 压力计算
B6 = B5 - 4000;
X1 = (B2 * (B6 * B6 >> 12)) >> 11;
X2 = AC2 * B6 >> 11;
X3 = X1 + X2;
B3 = (((AC1 * 4 + X3) << 1) + 2) >> 2;
X1 = AC3 * B6 >> 13;
X2 = (B1 * (B6 * B6 >> 12)) >> 16;
X3 = ((X1 + X2) + 2) >> 2;
B4 = AC4 * (uint32_t)(X3 + 32768) >> 15;
B7 = ((uint32_t)raw_pressure - B3) * (50000 >> 1);
if (B7 < 0x80000000) {
p = (B7 * 2) / B4;
} else {
p = (B7 / B4) * 2;
}
X1 = (p >> 8) * (p >> 8);
X1 = (X1 * 3038) >> 16;
X2 = (-7357 * p) >> 16;
*true_pressure = p + ((X1 + X2 + 3791) >> 4);
}
iic.h
#ifndef __IIC_H
#define __IIC_H
#include <linux/i2c.h>
#include <linux/i2c-dev.h>
#include <fcntl.h>
#include <sys/ioctl.h>
#include <unistd.h>
#include <stdio.h>
#define Slave_Addr 0x77
#define Data_Out_MSB 0xF6
#define Data_Out_LSB 0xF7
#define Data_Out_XLSB 0xF8
#define Tempture_Pressure_reg 0xF4
int iic_init(const char *device);
int iic_close(int fd);
int iic_read(int fd, uint8_t slave_addr, uint8_t reg_addr, uint8_t* buffer, int length);
int iic_write(int fd, uint8_t slave_addr, uint8_t reg_addr, uint8_t* data, int length);
void read_calibration_data(int fd, int16_t* AC1, int16_t* AC2, int16_t* AC3, uint16_t* AC4, uint16_t* AC5, uint16_t* AC6, int16_t* B1, int16_t* B2, int16_t* MB, int16_t* MC, int16_t* MD);
void calculate_true_values(int32_t raw_temp, int32_t raw_pressure, int32_t* true_temp, int32_t* true_pressure, int16_t AC1, int16_t AC2, int16_t AC3, uint16_t AC4, uint16_t AC5, uint16_t AC6, int16_t B1, int16_t B2, int16_t MB, int16_t MC, int16_t MD) ;
#endif
main.c
#include <stdio.h>
#include <fcntl.h>
#include <linux/i2c-dev.h>
#include <sys/ioctl.h>
#include <unistd.h>
#include <stdint.h>
#include <linux/i2c.h>
#include <string.h>
#include "iic.h"
int main() {
int fd;
int32_t raw_temp, raw_pressure, true_temp, true_pressure;
int16_t AC1, AC2, AC3, B1, B2, MB, MC, MD;
uint16_t AC4, AC5, AC6;
uint8_t send_data[1];
uint8_t receive_temp[2];
uint8_t receive_pressure[3];
// 打开I2C设备
fd = iic_init("/dev/i2c-7");
if (fd < 0) {
perror("iic_init error");
return -1;
}
// 读取校准数据
read_calibration_data(fd, &AC1, &AC2, &AC3, &AC4, &AC5, &AC6, &B1, &B2, &MB, &MC, &MD);
//开始测量温度
send_data[0] = 0x2e; //要写入的数据
if (iic_write(fd, Slave_Addr, Tempture_Pressure_reg , send_data, 1) <0) {
perror("iic_write error");
close(fd);
return -1;
}
usleep(4500); // 等待测量完成
// 读取未校准的温度数据
if (iic_read(fd, Slave_Addr, Data_Out_MSB , receive_temp, 2) < 0) {
perror("iic_read error");
close(fd);
return -1;
}
raw_temp= receive_temp[0]<<8|receive_temp[1]; //未校准的温度值
send_data[0] = 0x34; //要写入的数据
if (iic_write(fd, Slave_Addr, Tempture_Pressure_reg , send_data, 1) <0) { //开始测量压力
perror("iic_write error");
close(fd);
return -1;
}
usleep(4500); // 等待测量完成
// 读取未校准的压力数据
if (iic_read(fd, Slave_Addr, Data_Out_MSB , receive_pressure, 3) < 0) {
perror("iic_read error");
close(fd);
return -1;
}
raw_pressure =(receive_pressure[0]<<16|receive_pressure[1]<<8|receive_pressure[0]) >>8; //未校准的压力值
// 计算实际温度和压力
calculate_true_values(raw_temp, raw_pressure, &true_temp, &true_pressure, AC1, AC2, AC3, AC4, AC5, AC6, B1, B2, MB, MC, MD);
// 输出实际温度和压力
printf("True Temperature: %.2f C\n", true_temp / 10.0);
printf("True Pressure: %.2f hPa\n", true_pressure / 100.0);
// 关闭I2C设备
close(fd);
return 0;
}
























![[C++] 在VS code中打开VS studio的cpp文件并调试运行(弹出独立窗口)](https://img-blog.csdnimg.cn/img_convert/230d6dfb13f74cb7b60e4fa801a1f385.webp?x-oss-process=image/format,png)
![[Bug] Error: cannot import name ‘ALBERT_PRETRAINED_MODEL_ARCHIVE_LIST‘](https://img-blog.csdnimg.cn/direct/c9280967650a478f9728a0dfb0a820fd.png)
![[经验] 油汀取暖器怎么用-油汀取暖器使用方法详解 #媒体#学习方法](https://img-home.csdnimg.cn/images/20230724024159.png?origin_url=https%3A%2F%2Fwww.hao123rr.com%2Fzb_users%2Fcache%2Fly_autoimg%2F%25E6%25B2%25B9%25E6%25B1%2580%25E5%258F%2596%25E6%259A%2596%25E5%2599%25A8%25E6%2580%258E%25E4%25B9%2588%25E7%2594%25A8-%25E6%25B2%25B9%25E6%25B1%2580%25E5%258F%2596%25E6%259A%2596%25E5%2599%25A8%25E4%25BD%25BF%25E7%2594%25A8%25E6%2596%25B9%25E6%25B3%2595%25E8%25AF%25A6%25E8%25A7%25A3.jpg&pos_id=FpgvuF92)